Maxscript - objA.object_rotation from objB.face_normal
Hello there!
Workflow:
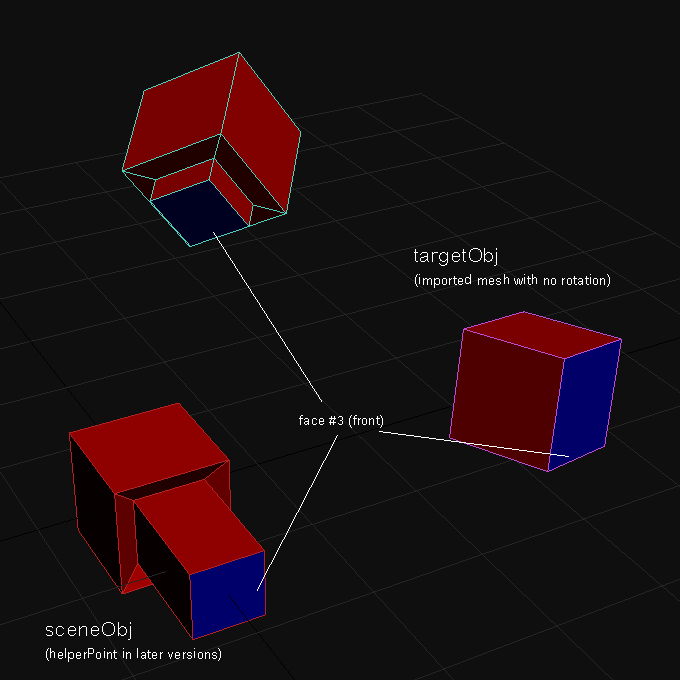
1. imported targetObj (cube, poly, *.obj)
2. on-scene sceneObj (cube, poly, later point helper)
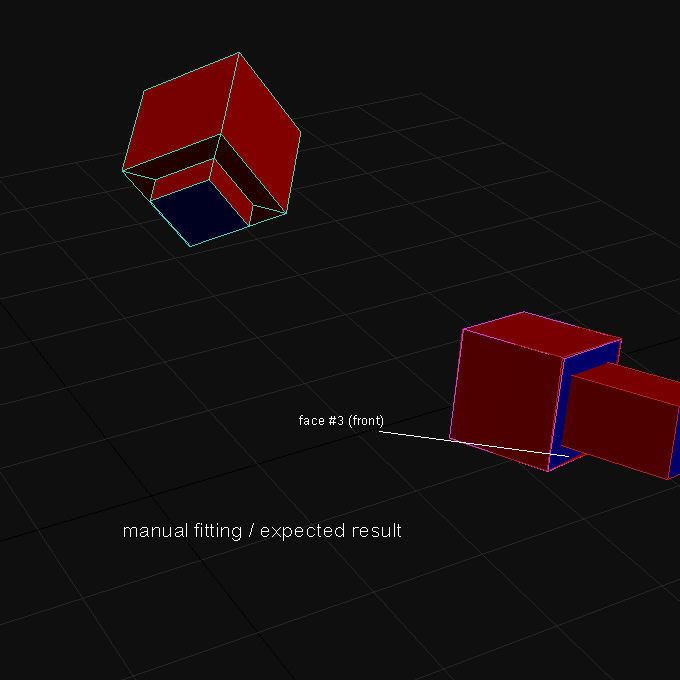
3. sceneObj.rotation = targetObj.rotation (the two cubes need to overlap)
3. sceneObj.pos = targetObj.pos
Problem:
Can't set proper axis / rotation to sceneObj from face normal of targetObj. Transformation nooberism.
Details:
I'm working on a simple import plugin, that imports custom mesh from another app into 3ds Max. In the 3ds Max scene I have a helper (a cube for testing right now) and I need to fit the position and rotation to another one (same size, 6 polys) which is imported. This proves to be extremely difficult for me, and while the position is no problem at all (sceneObj.pos = targetObj.pos) I'm totally lost at matrix3, eulerangles and quat values. And (sceneObj.rotation = targetObj.rotation) is not an option, as the simple imported *.obj file has NO rotation at all.
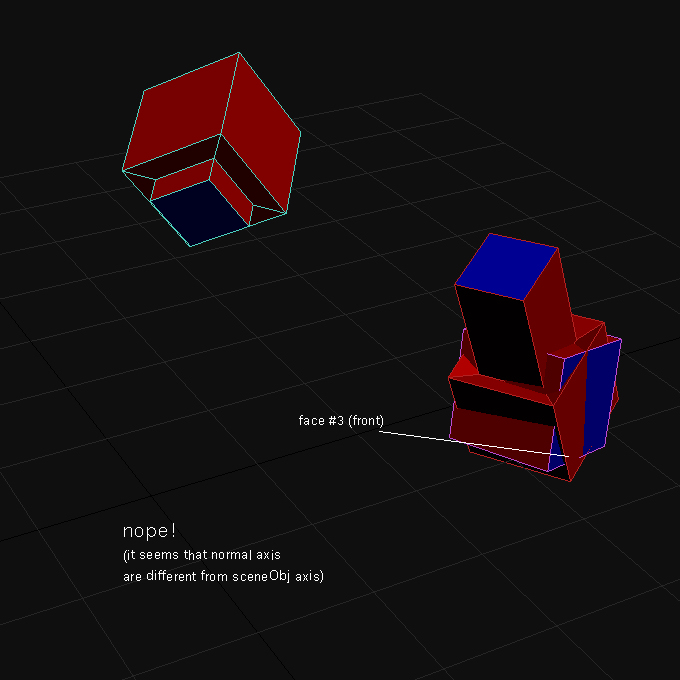
So - I've thought that getting the matrix3 of the normal of face 3 (front face) of the targetObj. I managed to somehow translate the rotation to my scene object but I think the axis are all wrong - some of them keep the sceneObj aligned properly, while when targetObj orientation changes it rotates the sceneObj in the wrong direction / along wrong axis.
Code:
fn getAngleFromNormal targetObj sceneObj = ( --RESET sceneObj ROTATION oldTranslateMtx = transMatrix sceneObj.transform.pos oldScaleMtx = scaleMatrix sceneObj.transform.scale sceneObj.transform = oldScaleMtx * oldTranslateMtx mtx = matrixFromNormal (polyOp.getFaceNormal targetObj 3) sceneObj.transform *= mtx eu = mtx as eulerangles rx = eu.x ry = eu.y rz = eu.z sceneObj.rotation *= inverse (eu as quat) sceneObj.pos = targetObj.pos )
Screenshots:
http://i.imgur.com/XHDe9ic.jpg
http://i.imgur.com/89LRbv9.jpg
http://i.imgur.com/cA0YU5D.jpg
I'm really, really hopeless if it goes for things such as these, so I'd appreciate any and all help that can direct and teach me even a bit.
Thanks for your time,
Michelle.
| Attachment | Size |
|---|---|
| direction_1.jpg | 157.03 KB |
| direction_2.jpg | 140.27 KB |
| direction_3.jpg | 128.28 KB |
{kind=link}
{kind=link}
{kind=link}
Comments
`
hey,
try this :
Found it here:
http://forums.cgsociety.org/archive/index.php/t-337793.html